Robot navigation presents several practical challenges. Sometimes you’ll have to fix localization issues or manually operate a robot. In these situations, you need to interact with the robot to achieve specific goals. However, what if your target is in a narrow area with limited maneuverability? And how can you focus on signs or navigation markers to make them more readable?
These and other questions can be answered using InOrbit Control.
Using InOrbit Control
InOrbit lets you communicate with your robots in real time by issuing user commands, called interactions. These interactions are defined by the precision and the distance of desired movements. For example, if you wanted your robot to run a very short distance, the Precision teleoperation command, which is intended for distances of less than 2 meters, would come in handy.
Navigating obstacles from specific points
Waypoint teleoperation commands your robot to navigate from point A to point B, while Open teleoperation allows for free movement over short distances. To visualize unreachable or specific signs and objects using your robot’s cameras, you can combine both interactions, navigating out of problem areas initially using waypoint teleoperation, perhaps traveling the long way around an obstacle, and then using open teleoperation to finally pinpoint your ultimate target.
Hi-rez for all cameras
A quick way to improve your camera quality is by clicking on the Hi-Rez switch, placed in the upper right corner of the navigation toolbar. However, this will only apply the change to the default camera. To enable Hi-Rez quality for all cameras, select the “Higher quality” property in the camera settings.

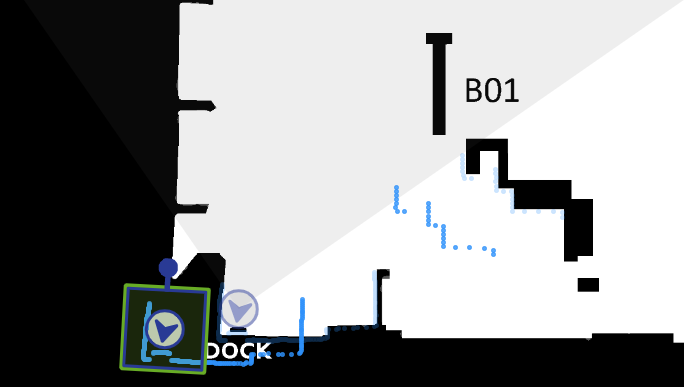
Navigating through narrow areas
Warehouse boxes and racks may create narrow corridors that your robot may find difficult to navigate. The Costmap layer indicates how much effort is required to traverse specific areas by shading the most expensive ones with a darker color.
So, in an effort to optimize its return on investment, your robot may ignore a command that takes it through an expensive area. Test and learn about expensive areas by using the Waypoint interaction and targeting different areas. If your robot does nothing after executing the action, that area may be too costly and unreachable.
Another more effective option is using Precision teleoperation when you are closer to tight areas. This command can precisely measure distances of less than 2 meters, so try to get as close to the target as possible before using it.

Help! My robot went crazy
Robots calculate their location based on various inputs, like wheel sensors, cameras, lidars, and more. Sometimes they miscalculate their position though. You can see an example of this when the lidars don’t match the walls of your map. Use the Relocalize interaction to align both navigation references to assist your robot in finding its way.
Like a pro
There is really no limit about what InOrbit can do when used like a pro. It provides the tools and data you need to navigate even in the most difficult situations. Mastering robot navigation requires practice and a solid understanding of the basics., With time, we know you’ll be navigating your robots like a pro.